软件更新 | TSMaster 7-8月新功能来了!你升级了吗?
为持续赋能汽车电子研发,TSMaster在2025年夏季再度升级。TSMaster软件7-8月版本重磅推出了安全管理功能增强、IO API优化,并正式释放了RPC/IP与Ethernet PDU RBS的帮助手册。此次升级旨在为用户提供更强大、更灵活的开发工具链,通过更精细的安全管控、更高效的硬件交互以及更清晰的以太网协议开发支持,直面当前汽车网络开发的复杂挑战。
TSMaster 2025.07.08
您可以通过下方的功能详解视频,全面了解此次更新的各项新特性。
安全管理
【 用户事件 】
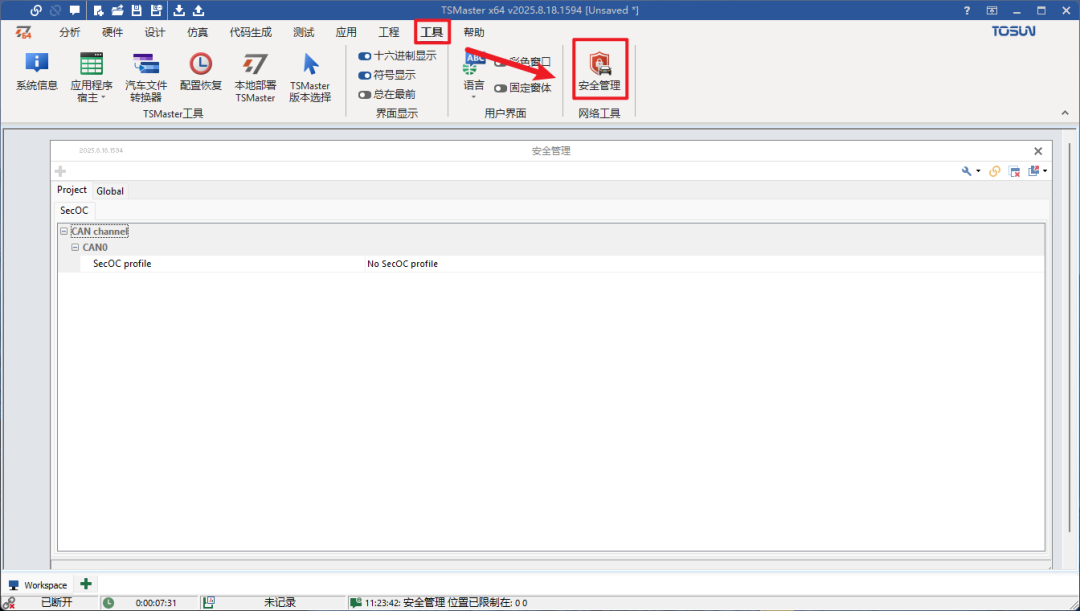
→【工具】-【安全管理】
更新功能:
TSMaster全新安全管理模块上线,集成AUTOSAR SecOC PDU级身份验证与IEEE MACsec链路加密,可实现对CAN/CAN FD、以太网报文实施完整性校验与实时加密,有效阻断重放、窃听及篡改,为车载网络提供端到端的安全测试与验证环境。
【 SecOC 】
SecOC是个针对于PDU的生成消息验证码的方案,一般使用AES-CMAC更多。
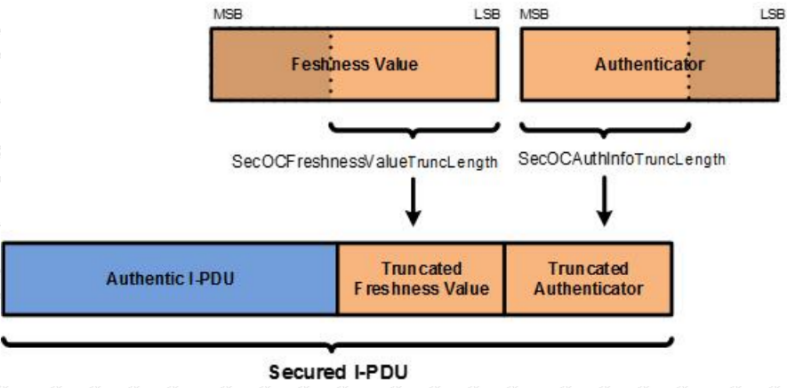
1.SecOC计算安全PDU
计算方式:原始PDU + 截断的新鲜值 + 截断的验证消息。
根据不同的算法,验证消息的长度不同,为了保证PDU(尤其是CAN的)可以容纳下所有信息,因此需要对结果进行截断。另外E2E和SecOC可以同时存在。
2.SecOC新鲜值
AutoSAR提供了三种新鲜值的形式。
第一种,截取原始报文的一段作为新鲜值。
第二种,和E2E一样使用一种比较复杂的counter。存在同步PDU或是重置PDU修改counter值的情况。
第三种,使用时间戳作为新鲜值。专门的时间戳PDU同步时间。校验方通常使用自己同步的时间戳的高位和报文中截断的新鲜值的低位合并在一起,作为计算的条件。这样可以有效的避免时间同步有误差的问题。
实际实践中,不少主机厂都会在AutoSAR标准上额外加一些内容,例如,对传输的时间戳额外进行一次加密等。对于这种情况,TSMaster将以插件的形式提供定制。
【 MACSec 】
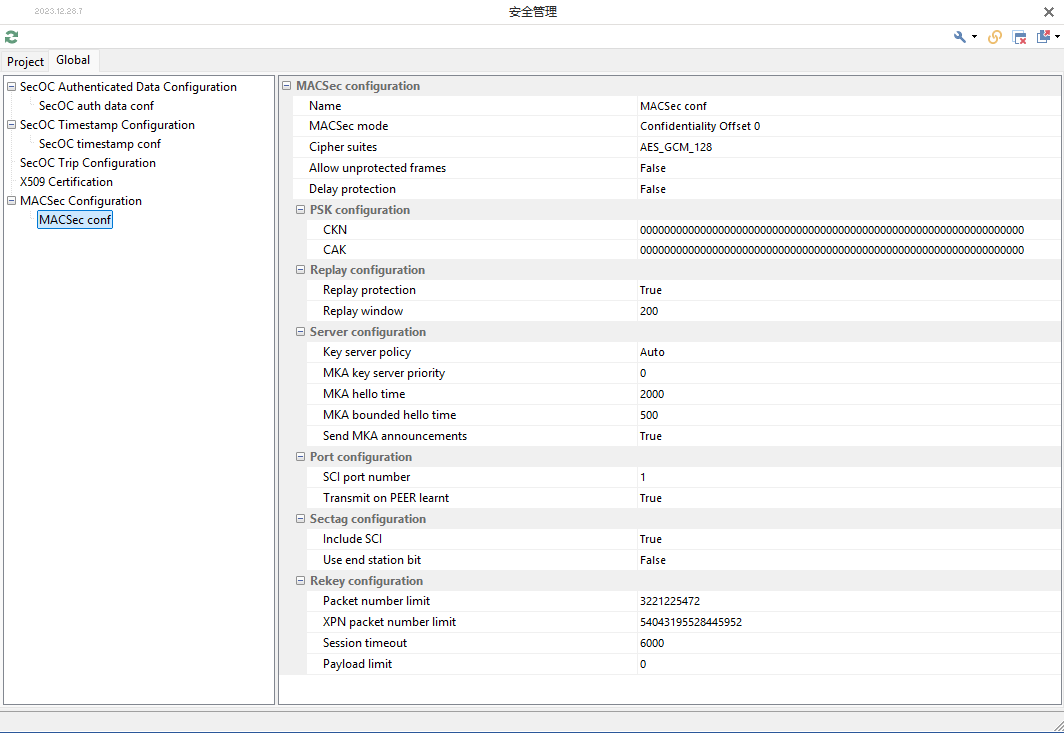
MACSec是一种针对以太网链路层的加密功能。参考IEEE 802.1 AE和IEEE 802.1 X。目前TSMaster实现软件层面的MACSec功能,支持:
●MACSec配置:
MACsec Mode:定义MACsec的操作模式
Cipher Suites:指定支持的加密套件列表控制是否允许未经保护的帧传输
Unprotected Frames Allowed:控制是否允许未经保护的帧传输
●重放配置:
Replay Protection:启用或禁用数据重放保护
Replay Window:设置重放保护窗口大小
●通过MKA动态分配密钥:
Key Server Policy:管理密钥服务器角色策略
MKA Key Server Priority:定义MKA密钥服务端选举的优先级,数字越小优先成为服务端
MKA Hello Time [ms]:设置MKA协议问候包的时间间隔
MKA Bounded Hello Time [ms]:指定MKA有界问候时间
Send MKA announcements:管理是否发送MKA通告
●端口配置:
Transmit on peer learnt:控制是否在侦测到匹配端时立刻传输数据
SCI Port Number:分配Secure Channel Identifier(SCI)的端口号
MACSec功能简述
MACsec提供数据链路的帧级安全保护,支持两种模式:
●纯认证模式(验证数据完整性)
●加密+认证模式(提供机密性与完整性)
工作模式:
逐跳保护(Hop-by-Hop):在直接相连的设备间建立安全通道,保护物理链路。
安全封装:
基于SAK,在原始以太网帧头部插入SecTAG(安全标签),帧尾部附加ICV(完整性校验值),由AES-GCM算法生成(128/256位密钥)。
数据帧流程:

【 C小程序 】
→【IO模块API函数接口更新】
tsdi_get_vlevel_input_sync
函数说明:获取数字输入电压电平。
tsdi_get_pwm_input_sync
函数说明:获取数字输入的PWM值。
tsdi_config_sync
函数说明:通知硬件设备结束I/O配置。调用此API后,配置参数即生效。
tsdo_set_vlevel_output_async
函数说明:设置数字I/O输出电压电平。
tsdo_set_pwm_output_async
函数说明:设置数字输入输出PWM输出。
tsdo_config_sync
函数说明:配置指定数字输出通道的参数。
tsio_start_configuration
函数说明:通知硬件设备为I/O配置做好准备。
tsio_end_configuration
函数说明:通知硬件设备结束I/O配置。调用此API后,配置参数即生效。
其他:
get_ai_channel_count()、get_ao_channel_count()、get_di_channel_count()、get_do_channel_count()、set_ai_channel_count()、set_ao_channel_count()、set_di_channel_count()、set_do_channel_count()
→【CAN IL API函数接口更新】
can_il_register_autosar_pdu_event
函数说明:注册AutoSAR PDU传输和接收的完成事件。
can_il_unregister_autosar_pdu_event
函数说明:取消注册AutoSAR PDU传输和接收的完成事件。
can_il_register_autosar_pdu_pretx_event
函数说明:注册AutoSAR PDU预传输事件。
can_il_unregister_autosar_pdu_pretx_event
函数说明:取消注册AutoSAR PDU的预传输事件。
→【CAN故障注入API函数接口更新】
can_rbs_fault_inject_disturb_sequencecounter
函数说明:向指定的PDU注入序列计数器故障。
can_rbs_fault_inject_disturb_checksum
函数说明:向指定的PDU注入校验和错误。
can_rbs_fault_inject_disturb_updatebit
函数说明:用于向指定的PDU注入更新位故障。
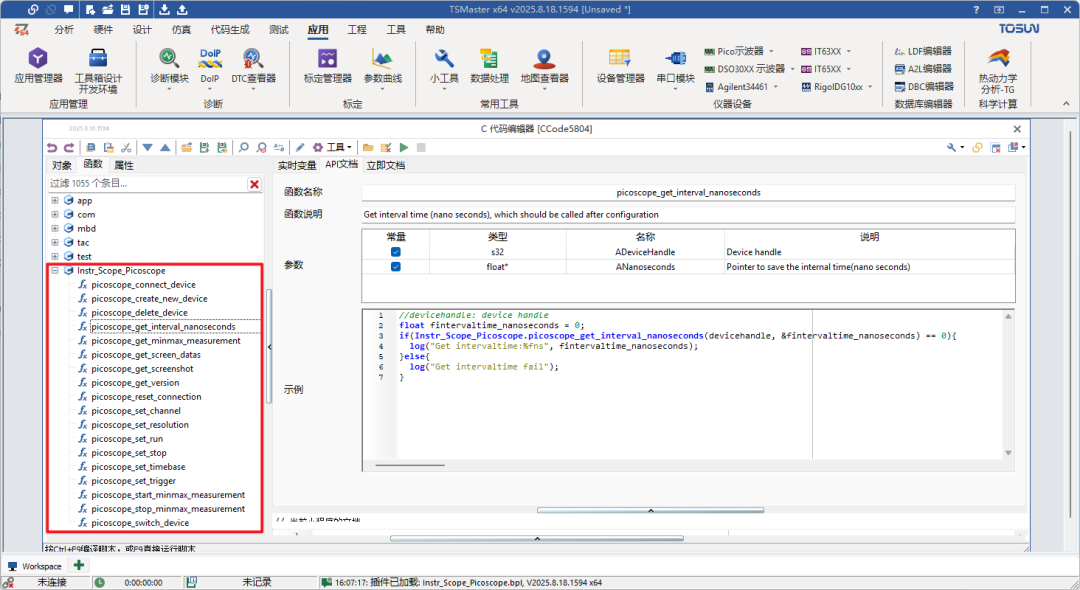
→【仪器/示波器API函数接口更新】
帮助
【 API文档 】
→【帮助】-【API文档】

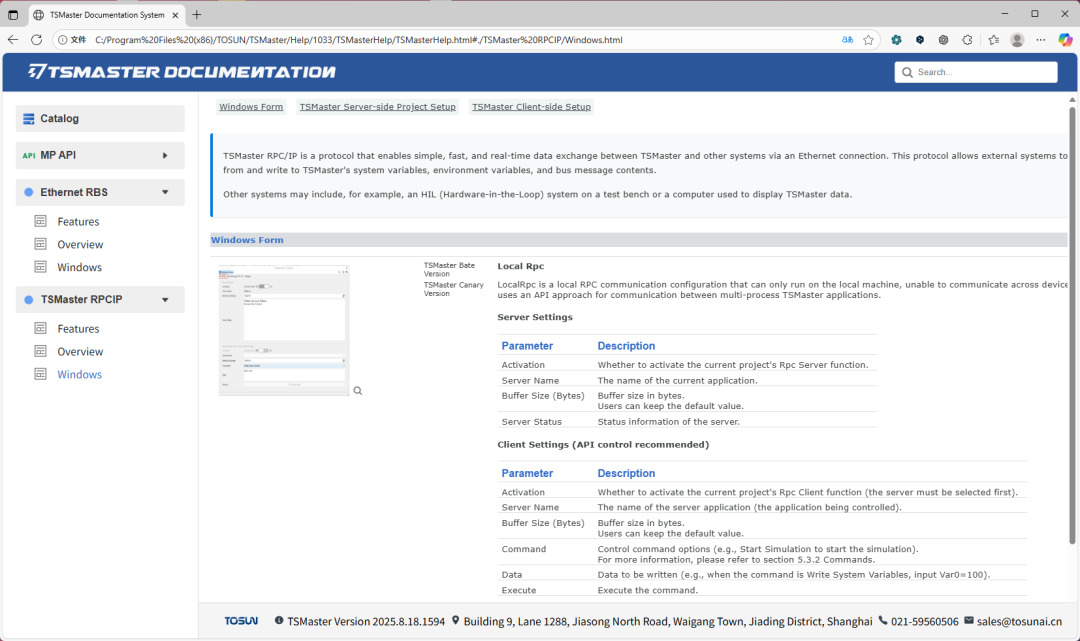
更新功能:新推出 RPC/IP与Ethernet PDU RBS HTML形式的支持文档。
- 【PCIE737】青翼凌云科技基于全高PCIe x8总线的KU115 FPGA高性能硬件加速卡
- 高压放大器如何赋能复合材料精密无损探伤
- 智能摊铺压实监测管理系统由哪些硬件组成呢?听小编来讲讲
- 分布式光伏电站智慧管理物联网系统方案
- 工业自动化如何选型?天硕工业级SSD接口指南赋能高效部署
- 功率放大器:压电陶瓷大功率测试系统的“能量引擎”
- 告别时间漂移:部署高精度时钟同步产品
- 激光焊接技术在焊接汽车油管工艺中的应用
- FP135/FP136/FP137 高端电流检测芯片:专为中高压(最高90V)系统设计
- 着色“活力红”,用AI点燃热烈生活
- 华为《AIDC机房参考设计白皮书》重磅发布,赋能AI算力基础设施迈向新高度
- 谷歌拟投资90亿美元扩建AI基础设施 加码南卡数据中心布局
- 河南移动联合华为全球首创5G-A套餐"Try&Buy"精准营销方案斩获ICT中国(2025年度)一等奖
- 中国信通院标准所联合发布《基于智能IP广域网(AI WAN)的存算分离与云边协同训推技术研究报告(2025年)》
- 量势而起・生态共盛・责筑未来 | 第三届新通话产业发展研讨会成功举办
- 中信科移动2025 PT展5大核心突破